
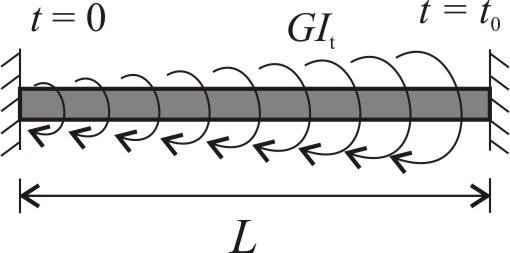
A beam built-in at both ends is subjected to a linearly varying torque. Present the differential equation of Saint-Venant torsion and give the boundary conditions. The torsional stiffness of the solid circular cross section, GIt is constant. Give the rotation function.
Solve Problem
Derive the rotation function parametrically.SolveCheck expression
Do you need help?
Steps
Step 1. Give the load function of the beam subjected to linearly distributed torque. Write the differential equation of Saint-Venant torsion. The geometrical and material equations results in The equilibrium equation is Step 3. Find a particular solution. The following particular solution satisfies the inhomogeneous equation Step 4. Write the general solution and determine its constants from the boundary conditions. Boundary conditions: At both supports the rotation is zero. The solution of the differential equation, i.e. the rotation function isStep by stepCheck load functionCheck differential equation
The differential equation of Saint-Venant torsion is obtained from the above equations:
Step 2. Write the solution of the homogeneous equation.Check homogeneous solutionCheck particular solutionCheck constants
Results
The torque load is linearly distributed along the length of the beam: The geometrical and material equations results in The equilibrium equation is The following particular solution satisfies the inhomogeneous equation Constants of the general solution are determined from the boundary conditions: Boundary conditions: At both supports the rotation is zero. The solution of the differential equation, i.e. the rotation function isShow worked out solution
The solution of the homogeneous equation is