
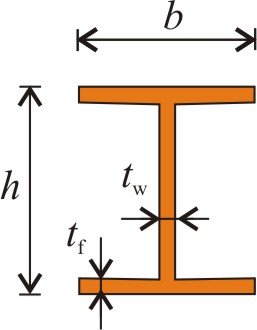
A cantilever I beam (L = 3.0m) is subjected to t = 4 kNm/m uniformly distributed torque load. At the fixed end there is no twist or warping. The thickness of the wall is tw = tf = 12 mm, width of the cross section is b = 260 mm, the height is h = 480 mm. The material properties are E = 210 GPa = 210 ×103 N/mm2, G = 80.8 GPa = 80.8 ×103 N/mm2. Calculate the rotation at the free end
a) neglecting warping stiffness (EIω = 0),
b) neglecting torsional stiffness (EIt = 0),
c) taking both the warping and torsional stiffness into account.
Solve Problem
Rotation of the free end, ψ [rad]= a) b) c)Solve
Do you need help?
Steps
Problem a) Step 1. Give the torsional stiffness of the cross section. Step 2. Write the differential equation of Saint-Venant torsion. Step 3. Give the rotation function as the general solution of the differential equation. Step 4. Determine constants from boundary conditions. At the built-in end: At the free end: Step 5. Give the rotation function. Calculate end rotation. Problem b) Step 1. Give the warping stiffness of the cross section. Step 2. Write the differential equation of restrained warping. Step 3. Give the rotation function as the general solution of the differential equation. Step 4. Determine constants from boundary conditions. At the built-in end: At the free end: Step 5. Give the rotation function. Calculate end rotation. Problem c) Step 1. The torsional and warping stiffnesses of the cross section are calculated in Problem a) and b) respectively. Step 3. Give the solution of the homogeneous equation. where Step 4. Choosing a particular solution give the general solution. where Step 5. Determine constants from boundary conditions. At the built-in end: At the free end: Step 5. Give the rotation function. Calculate end rotation. Substituting the constants the rotation function is obtained: The end rotation is Step by stepCheck torsional stiffness
Check equation
Check general solution
Check boundary conditions
Check end rotationCheck warping stiffness
Check equation
Check general solution
Check boundary conditions
Check end rotationStep 2. Write the differential equation of torsion.Check equation
Check homogeneous solution
Check particular solutionCheck boundary condition
Check equation
Results
Problem a) The torsional stiffness of the thin walled cross section is calculated as The differential equation of Saint-Venant torsion is The rotation function is given as the general solution of the differential equation: where the constants are determined from the boundary conditions. At the built-in end: At the free end: The rotation function and the end rotation are given below. Problem b) The warping stiffness of the cross section is calculated as The differential equation of restrained warping is The rotation function is given as the general solution of the differential equation. The constants are determined from the boundary conditions. At the built-in end: At the free end: The rotation function and the calculated end rotation are given below Problem c) The torsional and warping stiffnesses of the cross section are calculated in Problem a) and b) respectively. where Then a particular solution is chosen. The general solution is shown below. The constants are determined from the boundary conditions. At the built-in end: At the free end: Substituting the constants the rotation function is obtained: The end rotation isShow worked out solution
The differential equation of torsion is